

پژوهشگران با ساخت روباتهای پادار، در تلاشند توانایی مانور و حرکت این ماشینها را در سطوح شنی افزایش دهند
وقتی کنار ساحل روی شنها راه میروید، چه حسی دارید؟ درست است که قدم زدن روی شن میتواند آرامشبخش و مطبوع باشد، اما سرعت راه رفتن شما را هم میگیرد. هر بار که قدم بر میدارید، کمیدر شنها فرو میروید و به راحتی وقتیکه روی آسفالتهای خیابان هستید، نمیتوانید بدوید یا کسی را دنبال کنید. اما این سختی تنها برای ما انسانها نیست. برای مدتی بسیار طولانی، روباتها هم با شن مشکل داشتند. تا اینکه بالاخره روباتهای جدیدی که شبیه حشرات ساخته شدهاند، با پاهای خاصی که برایشان طراحی شده، راهشان را روی شنها باز کردند.
گروهی از پژوهشگران امریکایی، روباتی را طراحی کردهاند که شیوه حرکت و گام برداشتنش متفاوتتر از روباتهای قبلی است تا بتواند راحتتر از پس شن بربیاید. البته با تمام تلاشهایی که انجام گرفته، باز هم سرعت این روبات شنی شش پا در بهترین حالت ، بیشتر از نصف سرعتی نیست که روی زمین مسطح و سفت دارد.
به نظر محققان، دستیابی به سرعتهای بیشتر فعلا ممکن نیست؛ مگر اینکه بتوان اطلاعات بیشتری راجع به خصوصیات و ویژگیهای موادی چون شن که به صورت دانهدانه هستند، کسب کرد. چون این مواد به طور همزمان کمی از خصوصیات جامدات را دارند و کمیهم خصوصیات مایعات.
ال ریتزی، پژوهشگر ارشد شرکت روباتسازی بوستون داینامیک که در ساخت بسیاری از روباتهای چند بازویی شریک بوده، در این باره میگوید: «این ابداع یکی از قدمهای مهم در راه درک بهتر اصول مکانیکی است که در پس اینگونه حرکات روباتها قرار دارد.»
روباتهایی که راه میروند، خیلی بیشتر از روباتهای چرخدار یا تسمهای و زنجیری (شبیه تانک) تعادل خودشان را حفظ میکنند. آنها در زمینهای ناهموار، ماسهای یا در مقابل موانع مانور بهتری دارند؛ پایدارترند و همچنین از انعطافپذیری بیشتری برخوردارند. این وسایل نقلیه تا حدی هوشمند را میتوان به خاطر قابلیتهایی که دارند، در مناطق دور از دسترس یا خطرناک استفاده کرد؛ همانطور که ناسا برای اکتشاف بر روی مریخ از دو مریخ نورد آپورچونیتی و اسپیریت استفاده کرد. (البته این دو مریخنورد بهجای پا از چرخ استفاده میکنند)
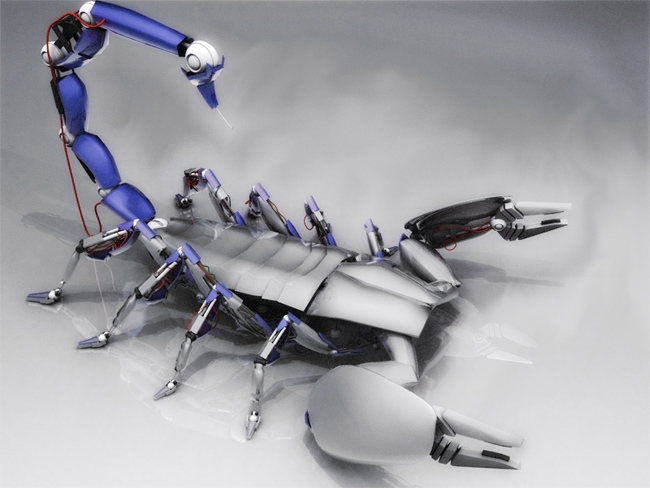
با تولد نسل جدید به نظر میرسد که این روباتها، پادار هم شدهاند. ریتزی در این مورد میگوید که توانایی قدم برداشتن از روی موانع، میتواند بازدهی کار روباتها را بالا ببرد و اهمیت و تاثیر آنها را در امور مختلف افزایش دهد. اخیرا مرکز تحقیقاتی ناسا مشغول آزمایش روباتی شبیه به عقرب است که برای اکتشافات فضایی طراحی شده است.
[روبات عقرب نمای ناسا] آرام به پیش
همانطور که پیشتر هم گفته شد، دانش بشر در مورد مکانیک حرکت بر روی شن و زمینهای ماسهای محدود است. حتی سوسمارهای بیابانی هم که جانواران سریعی به حساب میآیند، در ریگهای بیابان (نسبت به زمینهای سفت و صاف) فقط یکچهارم سرعت خود را دارند.
روبات شننورد «سندبات» متعلق به موسسه فناوری جورجیای امریکا میتواند به خوبی ناتوانی علم را در حوزه زمینهای شنی به ما نشان بدهد. این ماشین با وزنی حدود 2.3 کیلوگرم به سختی در شن حرکت میکند و نتایج نامطلوبی برای سازندگان خود داشته است.
سندبات شش پا دارد که هرکدام به شکل برشی از یک دایره هستند و به صورت مستقل از هم میچرخند. این روبات که به اندازه پای انسان است، روی زمینهای سفت با سه پا حرکت میکند. این سه پا همزمان باهم حرکت میکنند، یکی در یک طرف ماشین و دو پای دیگر در طرف دیگر. این طراحی سه پایهای از حالت ایستادن حشرات الهام گرفته شده که پاهایشان مثل دو سهپایه، همزمان بر روی زمین قرار میگیرند.
با چنین طراحیای، سرعت دستگاه بر روی زمین سفت و هموار چیزی حدود 60 سانتیمتر در دقیقه است. اما وقتی بر روی بستری از ذرات ریز آزمایش شود، مثلا دانه گیاهان، سرعت آن به 2 سانتیمتر در ثانیه کاهش مییابد. تحقیقات نشان میدهد که با اندک تغییراتی در سیستم حرکتی روبات میتوان سرعت را بهبود بخشید.
به طور مثال، پاهای انحنادار این روبات با شتاب زیادی به عمق شن فرو میروند، این باعث درگیری بیشتر ماشین در میان ذرات میشود و زمان بیشتری طول میکشد تا دوباره از آن بیرون بیاید و به حرکت خود ادامه دهد. بنابراین با کم کردن این شتاب میتوان سرعت را بالاتر برد. شنهایی که پشت این پاها فشرده میشوند، از فرو رفتن بیشتر دستگاه در شن جلوگیری میکنند و سپس پای نیمدایره ای حول محور خودش میچرخد و روبات را به جلو میراند.
کارایی چنین راهبردی به دو عامل مهم بستگی دارد؛ اول، بسامد گردش این پاهای نیمدایره شکل است، یعنی در هر ثانیه چند گام بردارد؛ و دوم، تراکم ذرات زمین زیر دستگاه. اگر تراکم ذرات پایین باشد، میتوان گفت که روبات به جای راه رفتن، در حال شناست! پاهای جلویی او مانند شناگری که در آب حرکت میکند، او را به جلو میکشد. در چنین شرایطی سرعت بسیار پایین میآید و دیگر بحث راه رفتن مطرح نیست.
اگر سرعت گردش این پاها را افزایش دهیم، باز نمیتوانیم انتظار سرعت بیشتری برای دستگاه داشته باشیم؛ چون تنها اتفاقی که میافتد، این است که روبات، شن و ماسه را به اطراف خود میپراکند. تنها جایی که روبات موفقتر خواهد بود، در زمینهایی است که تراکم ذرات بیشتری داشته باشد.
با توجه به ضعفهای این روبات شش پا، شاید ساختن آنها به نظر ناامید کننده برسد؛ اما برخی از محققان عقیده دارند که این نتایج به هیچ عنوان دلسردکننده نیست و با ساختن پایههای ساده و تنظیم و تغییر چند پارامتر میتوان به پیشرفتهای خوبی دست پیدا کرد.
دنیل گلدمن از موسسه فناوری جورجیا معتقد است که برای حل این مشکل نیز میتوان مثل خیلی مشکلات دیگر، از حیوانات یاد گرفت که چگونه برای غلبه بر مشکلاتشان، خود را با محیط تطبیق میدهند: «حالا که ما مدلی منطقی برای سندبات داریم، میتوانیم برای طراحی پایهها و قطعات جدیدتر اقدام کنیم. این مدل به ما کمک میکند تا مشاهداتمان را از طریقه حرکت حیواناتی چون سوسمار، خرچنگ و حشرات بر روی شن، بهتر درک کنیم.»

- نویسنده : یزد فردا
- منبع خبر : خبرگزاری فردا






















پنجشنبه 28,نوامبر,2024